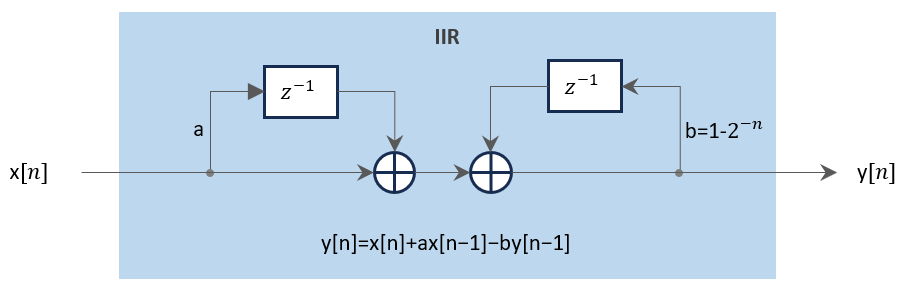
IIR Filter
An IIR high-pass filter is a recursive digital filter that attenuates low-frequency components including DC,
while allowing higher-frequency components to pass.
Its frequency response is determined by feedback coefficients,
which control the cutoff behavior and the degree of low-frequency suppression.
1-1. IIR Filter before Range FFT
It mainly serves as a signal pre-processing stage, removing DC offset and low-frequency noise rather than directly altering range estimation.
Its direct impact on target detection performance is limited, as it does not alter underlying range or velocity information
but instead conditions the input signal to improve stability, dynamic range, and SNR, with only negligible effects near zero-range components.

|
|
|
|
|
|
|
1-2. Example cases
The b value is tuned to control the input dynamic range of the Range FFT and to stabilize range peak detection.
| System Environment | Condition | a | b | Key Criteria | |
|---|---|---|---|---|---|
| HW System | Large ADC offset, LO leakage | -1 | 0.99 ~ 0.999 | Strong DC component → aggressive suppression | |
| Typical system condition | -1 | 0.98 ~ 0.995 | Basic DC removal with minimal signal distortion | ||
| Distortion-sensitive, micro-signal important | -1 | 0.95 ~ 0.98 | Preserve low-frequency components, avoid over-filtering | ||
| Reflection Environment | Strong static reflection (wall/floor) | -1 | 0.99 ~ 0.997 | Suppress low-frequency components (including static reflections) | |
| Typical environment (weak reflection) | -1 | 0.97 ~ 0.99 | Stable DC removal under moderate reflection | ||
| Low clutter, clean environment | -1 | 0.95 ~ 0.98 | Minimal filtering to preserve signal integrity |
2-1. IIR Filter is before Doppler FFT
The filter operates along the slow-time axis and directly shapes the Doppler spectrum,
making its tuning critical depending on which motion-related signals (targets) need to be preserved or suppressed.
It suppresses low-frequency components corresponding to static or slowly varying signals.
These low-frequency components correspond to near-zero Doppler (i.e., low or zero velocity targets).

|
|
|
|
|
|
|
2-2. Example Cases
The b parameter is adjusted according to the motion detection criteria.
| Target Category | Detailed State (Scenario) | a | b (Coefficient) | Effective Detectable Speed Range | |
|---|---|---|---|---|---|
| Human(Low-speed) | Micro-movement(Heartbeat/Breathing) | -1 | 0.995 ~ 0.999 | Ultra-low speed (≤ 0.1 m/s) pass-through, very high precision | |
| Static Presence(Keyboard Typing) | -1 | 0.968 ~ 0.984 | Extraction of subtle movements from a stationary person | ||
| Walking & Direction Change | -1 | 0.921 ~ 0.953 | Optimized clutter removal (tree leaves, static object residuals) during normal walking (~1 m/s) | ||
| Vigorous Motion(Gestures) | -1 | 0.875 ~ 0.906 | Reduced influence of low-frequency residual components during fast motion such as arm swinging | ||
| Vehicle(High-speed) | Urban Slow Driving(Stop & Go) | -1 | 0.843 ~ 0.875 | Detection of initial acceleration of stop-and-go vehicles | |
| City Driving(Normal) | -1 | 0.750 ~ 0.812 | Significant suppression of noise from surrounding buildings and roadside trees | ||
| High-speed Driving(Highway) | -1 | 0.625 ~ 0.750 | Strong attenuation of all low-frequency components except high-speed targets |
![]()
Radar Sensor SoC & Module
![]()
WiFi IoT Module
![]()
5G/LTE/CAT-M1/NB-IoT
![]()
WiSUN/HaLow/Thread Module
![]()