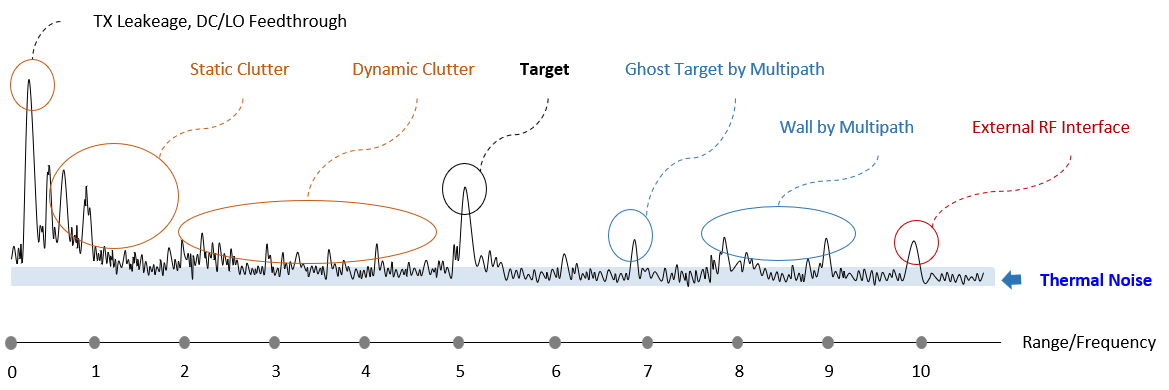
Noise and Threshold
Noise includes thermal noise, static/dynamic clutter from structures like walls, and by moving objects such as rustling leaves or curtains.
Thresholding sets a baseline filter above this “Noise floor” to separate “true targets(Signal)” from background noise.
The detector uses any signal exceeding this threshold as a primary trigger to initiate advanced verification algorithms.
1. The effect of Threshold
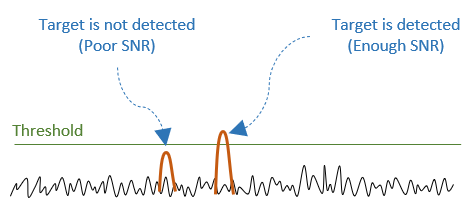
Detection capability relies on the threshold, which requires a careful balance between maximizing sensitivity and minimizing false alarms.
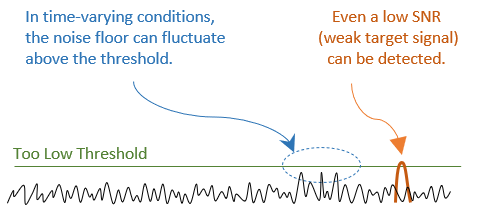
a low threshold can detect weak human movements but risks frequent false alarms by mistaking noise or dynamic clutter for real targets.
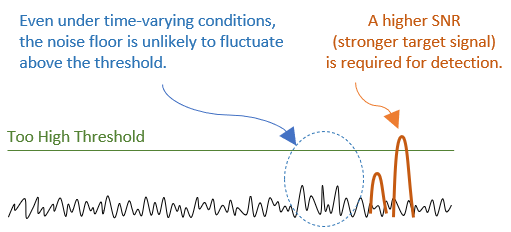
Conversely, a high threshold can detect only a high SNR signal but it causes missed detections by ignoring tiny movements or distant targets.
2. Methods of Threshold Setting
Threshold setting approaches generally fall into three categories: a Fixed Linear Threshold which applies a single straight baseline,
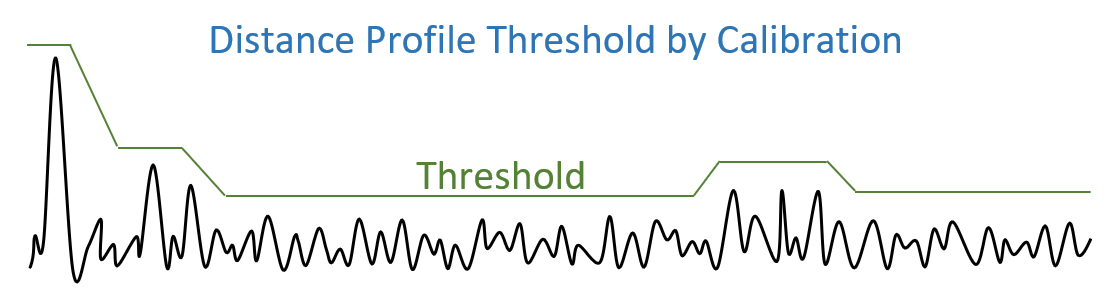
a Distance-Profile Threshold that uses baseline noise measurements to vary the limit by distance,
and an Adaptive Threshold that continuously updates to match real-time environmental changes.
3. Threshold-based Range Filter
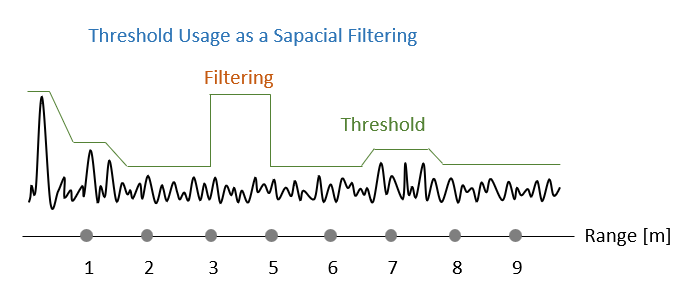
Beyond target separation from noise floor, thresholds can also function as a spatial filter to ignore specific areas.
For instance, by intentionally setting an excessively high threshold within a designated zone, such as between 3 and 4 meters,
The radar can blind itself to that specific range by threshold line.
![]()
Radar Sensor SoC & Module
![]()
WiFi IoT Module
![]()
5G/LTE/CAT-M1/NB-IoT
![]()
WiSUN/HaLow/Thread Module
![]()