Application System Block
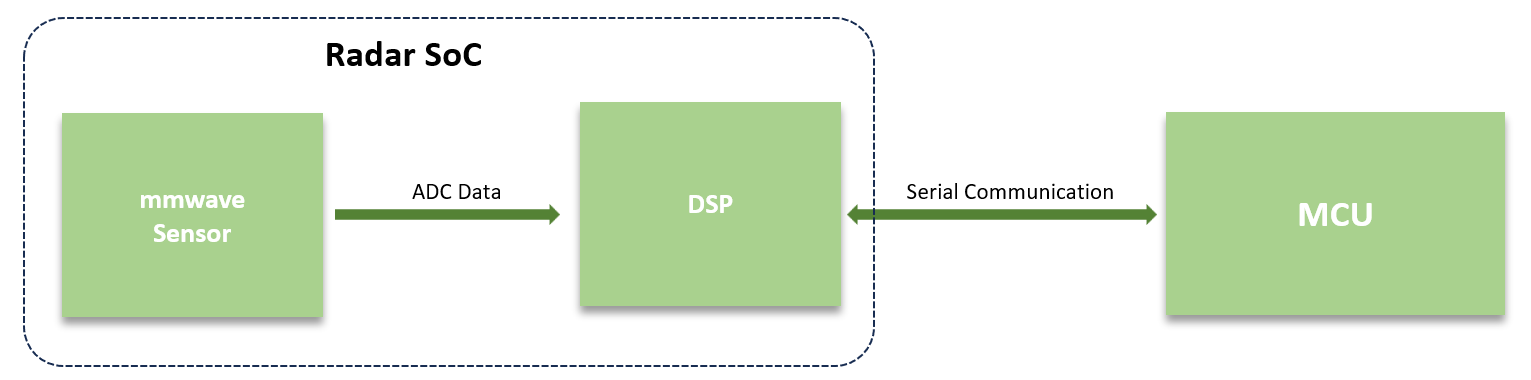
Radar Sensor Application의 구성과 각 블럭의 역할를 간단하게 보이고 있다.
 |
|||
|
Role → Measurement/Sensing (1) FMCW TX/RX (2) IF(Intermediate Frequency) (3) BB and Digitizing(ADC)
|
Role → DSP (1) Range FFT(거리정보) (2) Doppler FFT(속도정보) (3) Filtering(노이즈제거) (4) Basic Detection(Peak/CFAR) |
Role → Application Implementation (1) Radar SoC Configuration (2) 응용분야별 DSP 결과 후처리/해석 (3) User Interface
|
|


WiFi IoT Module
![]()
Bluetooth Module
![]()
5G/LTE/CAT-M1/NB-IoT
![]()