Detector Configuration
Target Detection Configuration supports configuring detection related parameters.
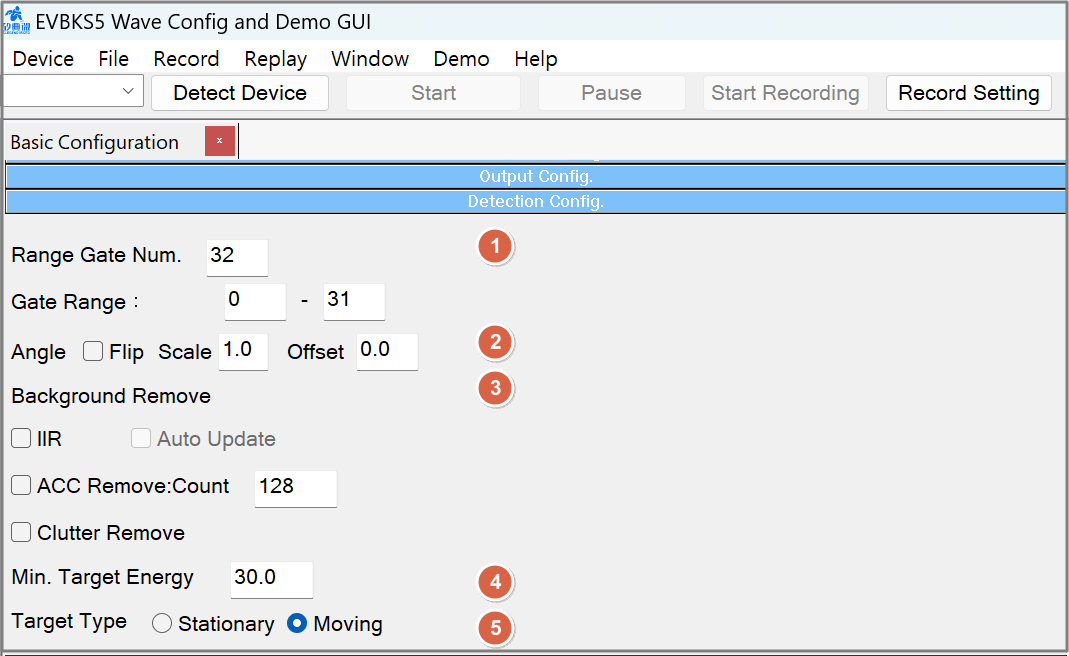
1. Range Gate
| Parameter | Description | |
| Number of Range Gate |
For setting the boundary of target Ranging zone should be less than the length of 1DFFT output(Frequency/Range Bin). |
|
|
Gate Range (Detection Range) |
For setting detection range, i.e. Target within this range will be detected The Ranging zone appears blue in this zone, and red elsewhere. |
2. Angle
| Parameter | Description | |
| Reverse/Flip | When the box is checked, the display of target ranging zone will be left-right reversed | |
| Scale | Scale the target angle to specified ratio | |
| Offset | Compensate the target’s angle. |
3. Background Remove
| Parameter | Description | |
| IIR(High Pass Filter) (Removing stationary object data) |
When the IIR box is checked, the firmware can be set to Automatic Update Background Mode (Auto Update) where the first two seconds will be used for sampling background noise (This only happens when Data Type is set to DSRAW or 1DFFT);
♦ While Automatic Update box is checked, the background information will update in real time, which is more suitable for scenarios where the ambient environment is in constant change. ♦ If the box is not checked, the background information will not update, which is suitable for scenarios where the ambient environment of the target stays unchanged.
|
|
| ACC Remove |
The bigger the ACC Remove count is, the longer it will take to remove the background noise. It is more suitable for detecting moving target. |
|
| Cluster Remove |
Use Cluster Remove algorithm. It is more suitable for detecting moving target. |
4. Minimum Target Energy
| Parameter | Description | |
| Min.Target Energy |
Display the energy threshold of the target, Only when the target’s energy is higher than the threshold will the target be displayed in GUI. |
5. Target Type
| Parameter | Description | |
| Stationary Target |
For detecting low speed, high energy targets, such as fixed CR (corner reflector) detection, and slow motion hand-held CR detection. For a stationary target, the Maximum Value Detection method is applied to detect the target’s position. |
|
| Moving Target |
For detecting a moving target in a complex environment, such as a moving human body. When detecting a moving target, Simple Background Remove should be checked. |
![]()
Radar Sensor SoC & Module
![]()
WiFi IoT Module
![]()
5G/LTE/CAT-M1/NB-IoT
![]()
WiSUN/HaLow/Thread Module
![]()